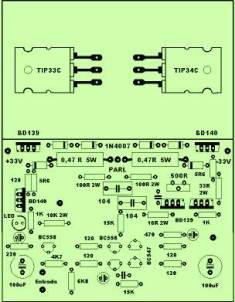
中运用了一种称为“镜”的体系,咱们看到它的右侧,它的功能要优胜得多。它由一个恒流发生器 Q1 组成,它供给约 4mA 的电流,为差分对 Q2 和 Q3 供电,晶体管 Q4 和 Q5 迫使它们对称作业,正如咱们所见,基极衔接在一起,迫使分支重复来自另一个的流程。此外,衔接到该差分的负载(RL)要轻得多,由于不是衔接到具有低阻抗的单个的基极,而是衔接到包含两个晶体管的驱动器,从而使阻抗上升而且愈加“轻” ”作业以鼓励电流放大器。因而,咱们在声响、清晰度、更大的转化速率和十分低的互调失真方面获得了更多的“自在”。
现在的放大器包含两对互补的达林顿管,武装在BD139++和BD140+TIP33C+TIP34C上,我现已得到了满足的实力和忠实的证明。为了安稳输出晶体管的静态电流,我运用了简略但有用的办法,即运用 4 个二极管1N4007 锚定基极偏置。请注意,二极管坐落灌电流输出的边际,即与其有热触摸,由于假如加热,输出级电压会下降联合,发生相同的静态电流。它经过在 10mA 时预设约 500 欧姆来固定,经过在扬声器输出中放置一个峰值为 200 毫伏的标度测试仪,并将另一个在发射极电阻0.47 欧姆 5 瓦的一端放置来丈量。您应该将预设值调至 5 mV 左右。
与原理图文及其解析 /
来驱动扬声器 /
41 与安置在达林顿的 BC547 和 BC557 相结合。剩余的达林顿组合将供给更
详解 /
【鸿蒙评测开箱】鸿蒙 HarmonyOS 开发板 IMX6ULL 评测开箱2-1#嵌入式开发
#硬声新人方案 无源雷达勘探方针 不发射信号,运用调频播送勘探方针,最大勘探间隔超越200公里#雷达