驾驭是当时轿车行业的研讨热门。智能驾驭概念涵盖了传统的高档驾驭辅佐体系(智能驾驭体系一般来说包含环境感知、智能决议计划及车辆操控三个部分,相应的,智能驾驭仿真测验环境需求包含路途交互与通行场景仿真、车辆动力学仿真及
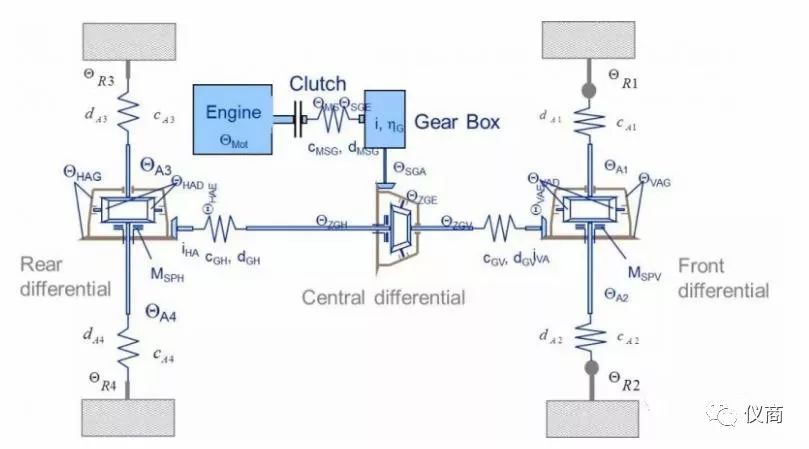
传统发动机动力体系、纯电驱动体系、混合动力体系、四轮驱动体系等多种形式底盘体系:包含多种形式的悬架模型、杂乱轮胎模型、转向体系模型、液压/气压制动体系模型以及多体车身动力学(纵向、侧向、垂向)模型
路途格局、支撑OpenCRG高精度路面描绘格局支撑杂乱路网结构:三岔路口、十字路口、立交桥等
能够自定义每个交通物体的驾驭行为,包含途径规划、速度操控、换道等,支撑事情触发形式
对各类传感器均可供给抱负环境感知传感器模型,直接输出方针级信息,包含交通物体的类型、方位、速度等信息,路途有关信息、交通标志信息等
仿真:可供给雷达回波模拟器体系,可集成实在毫米波雷达来测验摄像头:支撑直接输出摄像头捕捉到的图画,供给
等功能于一体的归纳体系,它会集运用了计算机、现代传感、信息交融、通讯、人工
代替燃油车已成大势所趋。2017年9月8日至10日,在天津滨海新区举办的我国
技能学习笔记(一) /
技能落地使用 /
评价办法与实践 /
技能发展和工业落地[2][3]。 联合国国际车辆法规和谐论坛(WP.29)
才能建造 /
【RK公开课】3A-AE 计算介绍 参数介绍 - RKDC2021 -2